多源融合感知技术科普《智能网联汽车的“超级眼”》
你知道吗?人靠眼睛感知世界,而车则依赖各种传感器设备。在自动驾驶的世界里,这些传感器就像车辆的“眼睛”,它们负责收集并分析车辆和道路环境的信息,为自动驾驶汽车提供全面的路况感知。而多源融合感知技术,则是这些“眼睛”背后的“超级大脑”,它将不同传感器收集到的信息进行整合与综合考虑,让自动驾驶汽车对环境的理解更为全面,从而减少错误和不确定性,确保行驶的安全。
想象一下,无人驾驶系统就像一个复杂的团队,其中感知融合部门就是这个团队的情报中心。它接收来自摄像头、激光雷达和毫米波雷达等“情报员”的信息,并将这些信息整合起来,为车辆提供准确的环境感知。这些传感器各有特色,也都有其局限性。现在,就让我们一起来认识这些“情报员”吧!
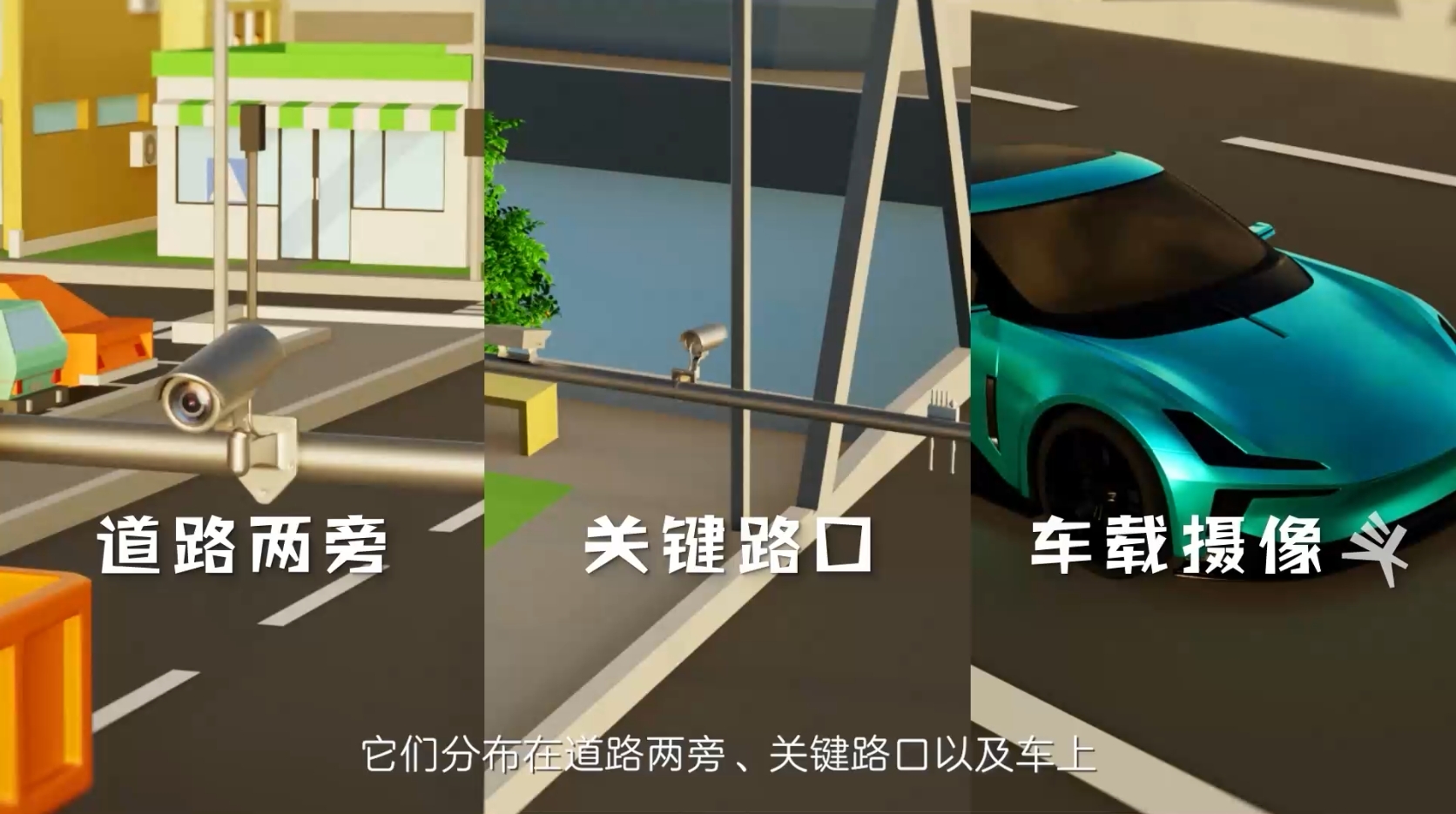
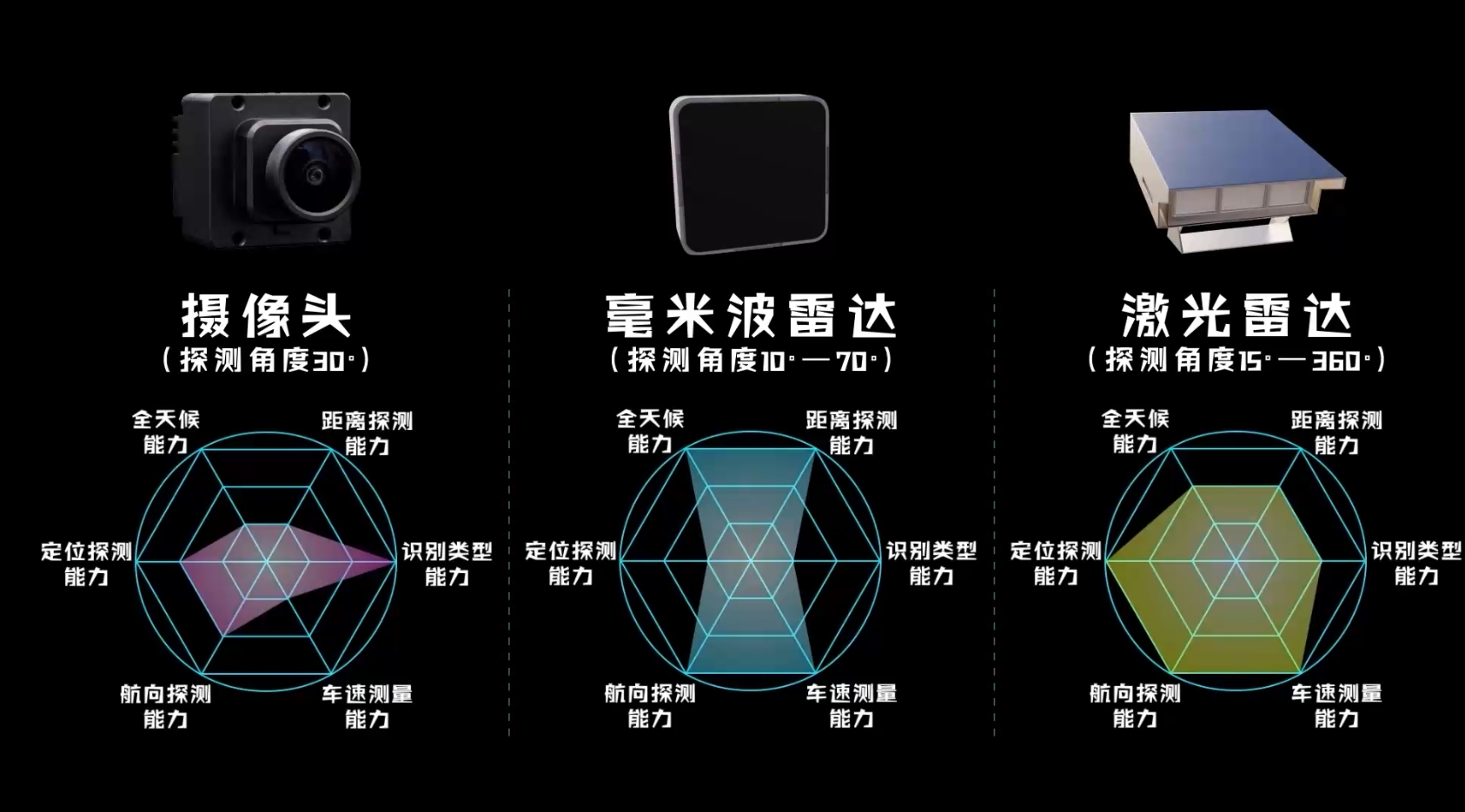
摄像头是团队的“视觉担当”,它能看到很多细节,比如车辆类型、路上的标志、车道线等。但是,它也有小缺点,比如晚上或雾天就看不清了,而且不能直接告诉车子前面的车有多快多远。毫米波雷达则是团队的“速度距离专家”,不管天气好坏,它都能准确告诉车子前面的东西有多远、多快、在哪个方向。但有时候它也会犯错,比如报告错误的信息或者漏掉某些信息。激光雷达是团队的“高精度侦探”,它用激光扫描,看得特别清楚,还能隐藏自己不被发现。不过,它对天气很敏感,下雨天或者雾天就看不清了。
单独一个“情报员”只能看到一部分情况,但不同的“情报员”互补,就能让自动驾驶汽车在各种条件下都能“眼观六路,耳听八方”,更加安全、可靠地行驶。多源融合感知技术就像是一个拼图大师,它用不同的方式将传感器的信息“拼”在一起,让自动驾驶系统对周围环境的理解更加准确和全面。
这些拼图大师,也就是算法,在各自的层次上工作,如同拼图时先拼大块再拼小块。常见的算法包括加权平均法、贝叶斯方法、卡尔曼滤波、DS证据理论和深度学习方法等。它们在不同的层次上共同协作,构成了多源融合感知技术的核心。
多源融合感知技术可以分为三个层次:目标级融合、特征级融合和数据级融合。目标级融合就像是在一堆积木里先找出所有红色的积木,然后再把这些红色积木放在一起。每个传感器先自己找出它看到的“目标”,比如车辆、行人等,然后将这些“目标”的信息汇总起来,系统再判断哪些是同一个目标。特征级融合则类似于在找积木时不仅看颜色还看形状。它会先从每个传感器的数据中提取出一些“特征”,如形状、大小、速度等,然后再把这些特征合并起来进行目标识别。数据级融合则更加直接,它将所有传感器的原始数据放在一起,从中提取出有用的信息。理论上,这种方式可以得到最准确的结果。
此外,多源融合感知系统还有三种不同的数据处理方式:分布式、集中式和混合式。分布式融合的特点是先由每个传感器进行简单处理,然后再将结果汇总。这样可以缩小搜索范围,提高目标识别的准确性。集中式融合的特点是将所有传感器的原始数据直接送到中央处理器进行处理。这样能够得到最全面的信息,作出的判断也更准确。混合式融合则是分布式和集中式的结合体,它具有更高的灵活性和准确性。每种方式都有它的优点和适用场景,让无人驾驶的车子更好地“看”懂周围的世界。
随着技术的不断发展,多源融合感知技术将在自动驾驶领域发挥越来越重要的作用。它不仅能够提高自动驾驶汽车的感知能力,还能够为未来的智能交通系统提供更加全面、准确的信息支持。在不久的将来,自动驾驶汽车将成为我们日常生活中不可或缺的一部分,为我们带来更加智能、便捷、安全的出行体验。让我们一起期待这个未来的到来吧!